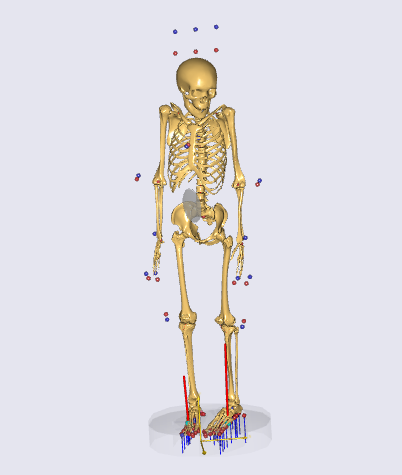
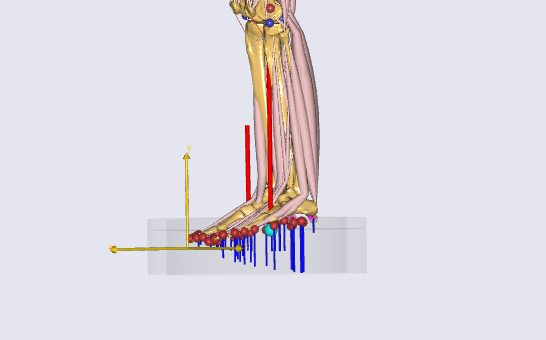
My model has issues with the angle between the foot and the ground.
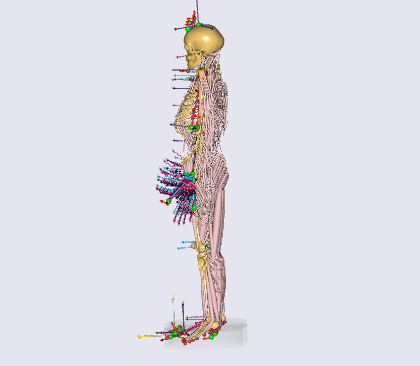
When the model is first loaded, it is normal.
But when the simulation is run, the angle changes as shown in the picture.
I set up Initial position of model by this code.
Main.HumanModel.Mannequin.Posture = {
// These can be ommitted if AutoPelvisPos above is used.
PelvisPosX = Main.ModelSetup.BVHFileData.Model.Hips.Seg.r0[0];
PelvisPosY = Main.ModelSetup.BVHFileData.Model.Hips.Seg.r0[1];
PelvisPosZ = Main.ModelSetup.BVHFileData.Model.Hips.Seg.r0[2];
PelvisRotX = 0.0;
PelvisRotY = -110.0;
PelvisRotZ = 0.0;
PelvisThoraxExtension = 0;
PelvisThoraxLateralBending = 0;
PelvisThoraxRotation = 0;
NeckExtension = 0;
NeckLateralBending = 0;
NeckRotation = 0;
Right =
{
HipFlexion = 0;
HipAbduction = 0;
HipExternalRotation = 0;
KneeFlexion = 0;
AnklePlantarFlexion = 0;
SubTalarEversion = 0;
GlenohumeralFlexion = 0;
GlenohumeralAbduction = 0;
GlenohumeralExternalRotation = 0;
ElbowFlexion = 0;
ElbowPronation = 0;
WristFlexion = 0;
WristAbduction = 0;
};
Left =
{
HipFlexion = 0;
HipAbduction = 0;
HipExternalRotation = 0;
KneeFlexion = 0;
AnklePlantarFlexion = 0;
SubTalarEversion = 0;
GlenohumeralFlexion = 0;
GlenohumeralAbduction = 0;
GlenohumeralExternalRotation = 0;
ElbowFlexion = 0;
ElbowPronation = 0;
WristFlexion = 0;
WristAbduction = 0;
};
}; // InitialPositionOfBody
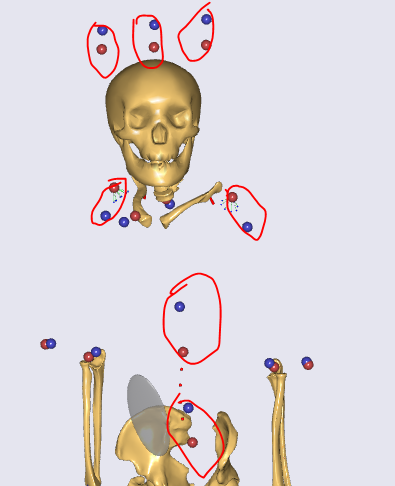
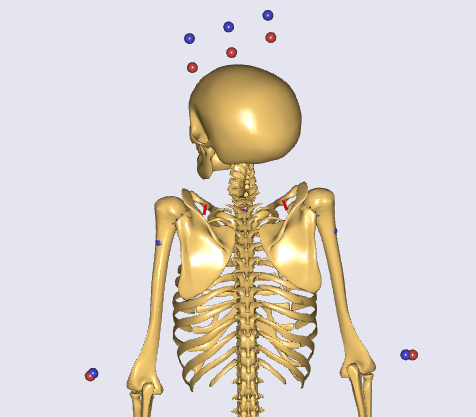
I modified marker position. but not exactly same with perception neuron nodes.
I guess It is because that 'Progressing to solve kinematic optimality conditions and hard constraints' message and erros occur.
the error message is below.
Failed to solve kinematic optimality conditions and hard constraints after 5 fallback attemps.
Constraint violations for study 'Main.Studies.MarkerTracking' :
Constraint #39 is above tolerance 1e-06, error = 0.000002, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.T1C7Jnt.Constraints'.
Constraint #42 is above tolerance 1e-06, error = 0.000002, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C7C6Jnt.Constraints'.
Constraint #45 is above tolerance 1e-06, error = 0.000002, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C6C5Jnt.Constraints'.
Constraint #48 is above tolerance 1e-06, error = 0.000001, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C5C4Jnt.Constraints'.
Constraint #51 is above tolerance 1e-06, error = 0.000001, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C4C3Jnt.Constraints'.
Constraint #55 is above tolerance 1e-06, error = 0.000001, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C3C2Jnt.Constraints'.
Constraint #57 is above tolerance 1e-06, error = 0.000004, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C2C1Jnt.Constraints'.
Constraint #61 is above tolerance 1e-06, error = 0.000003, constr. #4 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C2C1Jnt.Constraints'.
Constraint #63 is above tolerance 1e-06, error = 0.000002, constr. #1 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.C1C0Jnt.Constraints'.
Constraint #67 is above tolerance 1e-06, error = 0.000004, constr. #0 in 'Main.HumanModel.BodyModel.Trunk.JointsCervicalSpine.Flexion.CervicalFlexionRhythmDrv'.
Constraint #85 is above tolerance 1e-06, error = 0.000001, constr. #1 in 'Main.HumanModel.BodyModel.Right.ShoulderArm.Jnt.SCLinCon'.
Constraint #86 is above tolerance 1e-06, error = 0.000003, constr. #2 in 'Main.HumanModel.BodyModel.Right.ShoulderArm.Jnt.SCLinCon'.
Constraint #91 is above tolerance 1e-06, error = 0.000001, constr. #1 in 'Main.HumanModel.BodyModel.Right.ShoulderArm.Jnt.GHLinCon'.
Constraint #92 is above tolerance 1e-06, error = 0.000001, constr. #2 in 'Main.HumanModel.BodyModel.Right.ShoulderArm.Jnt.GHLinCon'.
Constraint #113 is above tolerance 1e-06, error = 0.000004, constr. #0 in 'Main.HumanModel.BodyModel.Right.ShoulderArm.Jnt.ScapulaAIThoraxNodeDriver'.
Constraint #114 is above tolerance 1e-06, error = 0.000025, constr. #0 in 'Main.HumanModel.BodyModel.Right.ShoulderArm.Jnt.SternoClavicularRotationRhythm'.
Constraint #115 is above tolerance 1e-06, error = 0.000002, constr. #0 in 'Main.HumanModel.BodyModel.Right.ShoulderArm.Jnt.ScapulaTSThoraxNodeDriver'.
Constraint #165 is above tolerance 1e-06, error = 0.000001, constr. #0 in 'Main.HumanModel.BodyModel.Left.ShoulderArm.Jnt.SCLinCon'.
Constraint #166 is above tolerance 1e-06, error = 0.000001, constr. #1 in 'Main.HumanModel.BodyModel.Left.ShoulderArm.Jnt.SCLinCon'.
Constraint #167 is above tolerance 1e-06, error = 0.000003, constr. #2 in 'Main.HumanModel.BodyModel.Left.ShoulderArm.Jnt.SCLinCon'.
Constraint #194 is above tolerance 1e-06, error = 0.000002, constr. #0 in 'Main.HumanModel.BodyModel.Left.ShoulderArm.Jnt.ScapulaAIThoraxNodeDriver'.
Constraint #195 is above tolerance 1e-06, error = 0.000026, constr. #0 in 'Main.HumanModel.BodyModel.Left.ShoulderArm.Jnt.SternoClavicularRotationRhythm'.
Constraint #196 is above tolerance 1e-06, error = 0.000002, constr. #0 in 'Main.HumanModel.BodyModel.Left.ShoulderArm.Jnt.ScapulaTSThoraxNodeDriver'.
Constraint #342 is above tolerance 1e-06, error = 0.000001, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsLumbar.PelvisSeg'.
Constraint #343 is above tolerance 1e-06, error = 0.000001, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsLumbar.SacrumSeg'.
Constraint #344 is above tolerance 1e-06, error = 0.000001, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsLumbar.L5Seg'.
Constraint #345 is above tolerance 1e-06, error = 0.000001, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsLumbar.L4Seg'.
Constraint #346 is above tolerance 1e-06, error = 0.000003, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsLumbar.L3Seg'.
Constraint #347 is above tolerance 1e-06, error = 0.000007, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsLumbar.L2Seg'.
Constraint #348 is above tolerance 1e-06, error = 0.000014, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsLumbar.L1Seg'.
Constraint #349 is above tolerance 1e-06, error = 0.000002, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsThorax.SkullSeg'.
Constraint #350 is above tolerance 1e-06, error = 0.000027, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsThorax.ThoraxSeg'.
Constraint #351 is above tolerance 1e-06, error = 0.000002, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsCervicalSpine.C1Seg'.
Constraint #352 is above tolerance 1e-06, error = 0.000010, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsCervicalSpine.C2Seg'.
Constraint #353 is above tolerance 1e-06, error = 0.000011, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsCervicalSpine.C3Seg'.
Constraint #354 is above tolerance 1e-06, error = 0.000012, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsCervicalSpine.C4Seg'.
Constraint #355 is above tolerance 1e-06, error = 0.000015, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsCervicalSpine.C5Seg'.
Constraint #356 is above tolerance 1e-06, error = 0.000018, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsCervicalSpine.C6Seg'.
Constraint #357 is above tolerance 1e-06, error = 0.000022, segment constr. 'Main.HumanModel.BodyModel.Trunk.SegmentsCervicalSpine.C7Seg'.
Constraint #358 is above tolerance 1e-06, error = 0.000003, segment constr. 'Main.HumanModel.BodyModel.Right.ShoulderArm.Seg.Clavicula'.
Constraint #359 is above tolerance 1e-06, error = 0.000014, segment constr. 'Main.HumanModel.BodyModel.Right.ShoulderArm.Seg.Scapula'.
Constraint #366 is above tolerance 1e-06, error = 0.000006, segment constr. 'Main.HumanModel.BodyModel.Right.ShoulderArm.Mus.DeltoidWrappingPosterior.WrappingSegment'.
Constraint #367 is above tolerance 1e-06, error = 0.000008, segment constr. 'Main.HumanModel.BodyModel.Right.ShoulderArm.Mus.DeltoidWrappingLateral.WrappingSegment'.
Constraint #368 is above tolerance 1e-06, error = 0.000008, segment constr. 'Main.HumanModel.BodyModel.Right.ShoulderArm.Mus.DeltoidWrappingAnterior.WrappingSegment'.
Constraint #374 is above tolerance 1e-06, error = 0.000002, segment constr. 'Main.HumanModel.BodyModel.Left.ShoulderArm.Seg.Clavicula'.
Constraint #375 is above tolerance 1e-06, error = 0.000007, segment constr. 'Main.HumanModel.BodyModel.Left.ShoulderArm.Seg.Scapula'.
Constraint #382 is above tolerance 1e-06, error = 0.000004, segment constr. 'Main.HumanModel.BodyModel.Left.ShoulderArm.Mus.DeltoidWrappingPosterior.WrappingSegment'.
Constraint #383 is above tolerance 1e-06, error = 0.000005, segment constr. 'Main.HumanModel.BodyModel.Left.ShoulderArm.Mus.DeltoidWrappingLateral.WrappingSegment'.
Constraint #384 is above tolerance 1e-06, error = 0.000005, segment constr. 'Main.HumanModel.BodyModel.Left.ShoulderArm.Mus.DeltoidWrappingAnterior.WrappingSegment'.
Constraint #388 is above tolerance 1e-06, error = 0.000001, segment constr. 'Main.HumanModel.BodyModel.Left.Leg.Seg.Thigh'.
Constraint #389 is above tolerance 1e-06, error = 0.000001, segment constr. 'Main.HumanModel.BodyModel.Left.Leg.Seg.Patella'.
ERROR(OBJ.MCH.KIN3) : AnyMocapModel.any(60) : MarkerTracking.Kinematics : Kinematic analysis failed in time step 1607 : Position analysis is not completed
If there is any other problem please tell me.
Thank you.