Hello
I am working on a project on musculoskeletal modelling. So far i managed to get the model running with my c3d file. I have made a lot of adjustments to my marker protocol and mannequin along with some sizing.
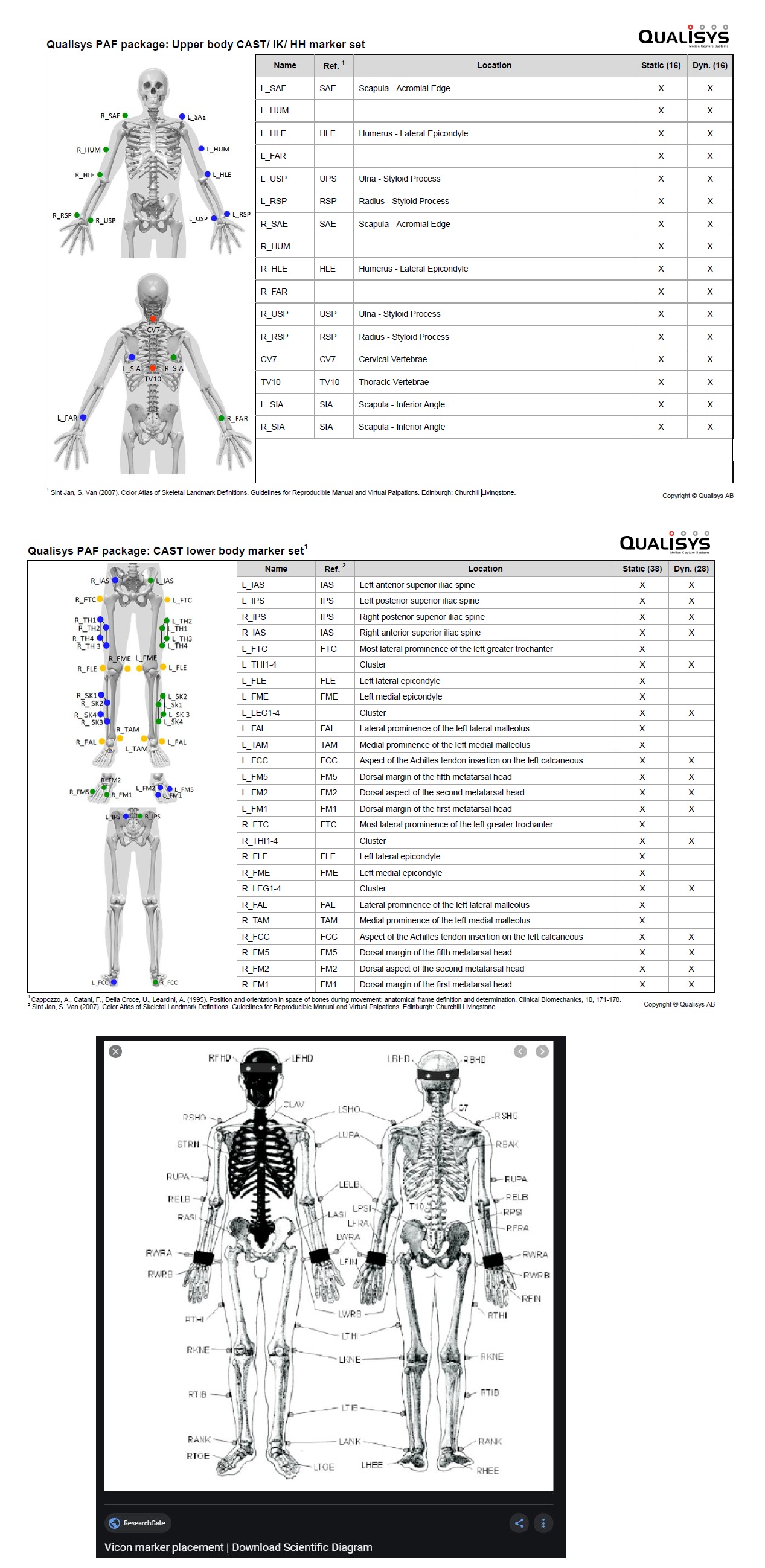
In my model i am using Qualisys marker set. So i had to change the names of all the marker landmarks from Qualisys, which was Vicon earlier. I have comment out the force plates for now.
The problem now is:
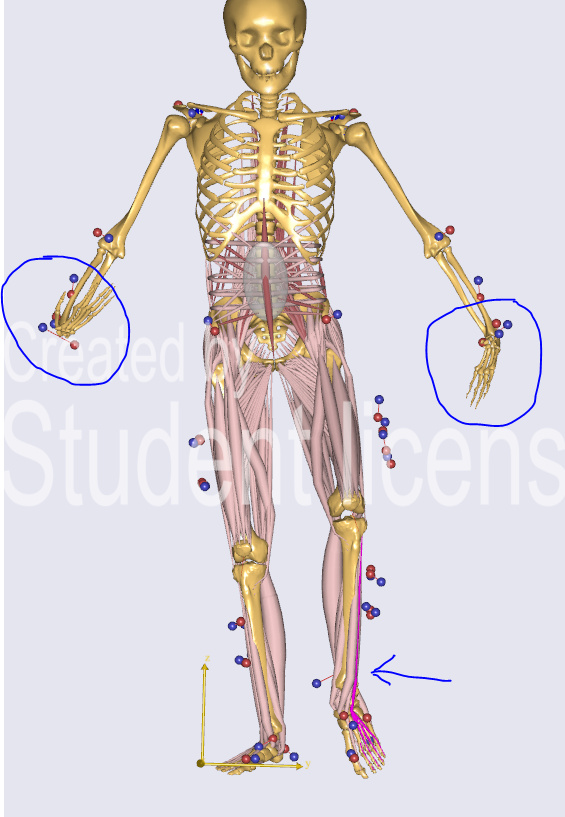
the wrist joint error, i dont know how to deal with the wrist motion. It not stable during marker tracking. this is while running marker tracking. To check: Marker protocol _RWRA, _RWRB, _LWRA, _LWRB.
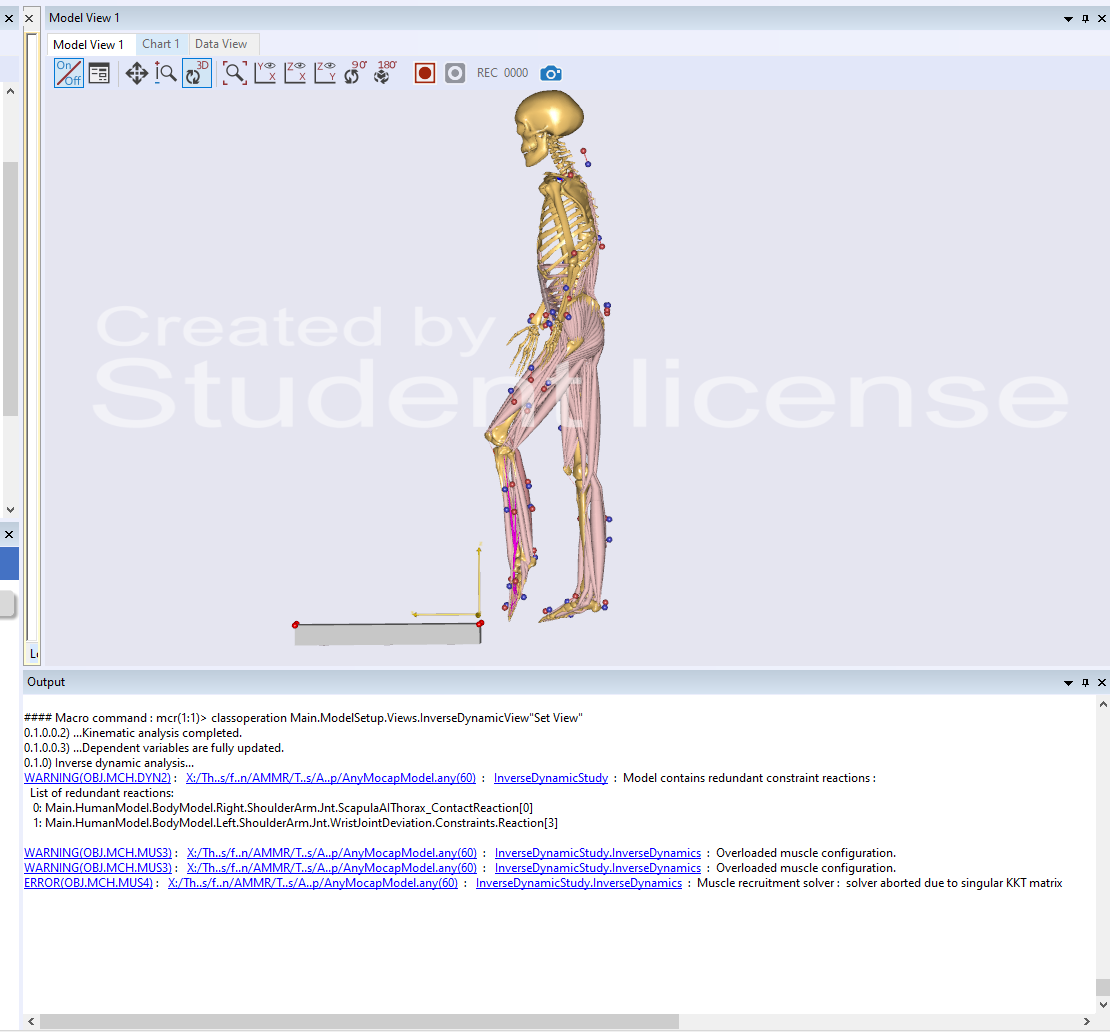
2)Once i run analysis, after 200 frame i get Overloaded muscle configuration and after a while i get a error, Muscle recruitment solver : solver aborted due to singular KKT matrix. how do i deal wit h this error. I see a overloaded left leg muscle.
Concerning the forceplate, you need this or GRF prediction to run inverse dynamics otherwise the model is "hanging" in the pelvis with feets in free air. The residual muscles used acting between pelvis and the world will be overloaded and the model fail with a KKT error as you have seen.
So add force plates and check the direction of gravity is correct in the LabSpecific.any file, then i think the model will work.
Hello
I switched on the drivers on the hand region, Now i have a more stable hand movement and it is not freely rotating in air. I believe since i had no markers on the hand, extra drivers were necessary to driver them.
As you advised, i fixed a force plate (type 3) and checked the gravity, and its now acting in the -ve z-direction. I still happen to get the same error as before.
And regarding the GRF prediction, can it be ON while using the force plates and if i use the ground force prediction i dont see the nodes on the lower foot.
But now my main concern is the overloaded muscle configuration, solver being aborted due to singular KKT matrix.
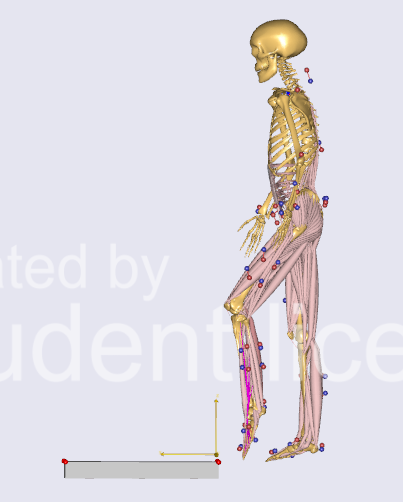
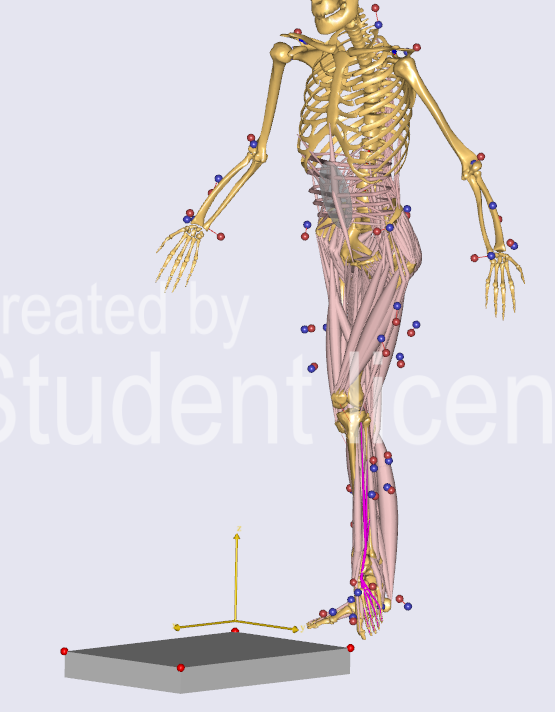
The subject is not on the plate in this frame, so he is hanging in the residual pelvis forces at this moment of time and these will also be overloaded which can trigger other muscles to be overloaded.
Secondly the ankle flexion is extreme …
Try to change tStart so that you start the analysis when forces have been measured… This is done in TrialSpecific.any file.
Hello
How can i change the force plate position, so that the subject is on the plate.
I have reduced the ankle flexion and added an extra driver to the knee,(KNEE_FLEXION) Since there were no markers driving it.
I also tried to run the entire simulation by keeping the original time from the c3d file.
I still happen to get the same error while running inverse dynamics.
As you suggested it could be the subject hanging, how can i move the force plates?
Another solution, i tried to adjust the model through Autopelvispos in TrailSpecificData, now only the model position moves without the markers. and while i run marker tracking it fails at timestep zero for this setup.
Hello
i would like to know if there are any drivers actually supporting the human model when not on the force plates. I figured out the model tends to fails when the left leg almost reaches the force plate and eventually right leg rises.
I refer to the full body main mocap examples, a loaded model is still in air. how is the left leg being balanced.
this answer would actually give me insight on how to balance my model when both legs in air.
thank you
For a model with forceplates in there is a residual force between pelvis and world that will carry residual forces, which can come from measurement errors. For a model using GRF predictions the residual force is made weak by purpose and only act as a "safety net".
I have looked at the C3D file, i think you should investigate if the problem relates to the extreme ankle flexion, there is a chance that the muscle moment arms becomes too small.
To test this try to add lines like this to the model
Note this will add an engine to the ankle joint and muscles spanning this joint will not need to carry any ankle moments. This may show if the problem relates to a muscle moment arm issue for the extreme flexion. If it makes the model run the next step would be to look at muscle moment arms to identify the problem in more detail.